

首先给大家复习几个基础定则:左手定则、右手定则、右手螺旋定则。别懵逼,我下面会给大家解释。 左手定则,这个是电机转动受力分析的基础,简单说就是磁场中的载流导体,会受到力的作用。

让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力的方向,我相信喜欢玩模型的人都还有一定物理基础的哈哈。 右手定则,这是产生感生电动势的基础,跟左手定则的相反,磁场中的导体因受到力的牵引切割磁感线产生电动势。

让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生的电动势方向。为何需要讲感生电动势呢?不知道大家有没有类似的经历,把电机的三相线合在一起,用手去转动电机会发现阻力非常大,这就是因为在转动电机过程中产生了感生电动势,由此产生电流,磁场中电流流过导体又会产生和转动方向相反的力,大家就会感觉转动有很大的阻力。不信可以试试。
▲三相线合并,电机转动阻力非常大 右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端就是通电螺旋管的N极。
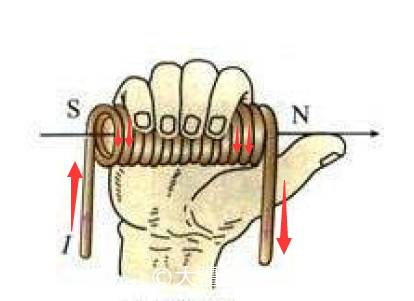
这个定则是通电线圈判断极性的基础,红色箭头方向即为电流方向。 看完了三大定则,我们接下来先看看电机转动的基本原理。
我们找到一个中学物理学过的直流电机的模型,通过磁回路分析法来进行一个简单的分析。

当两头的线圈通上电流时,根据右手螺旋定则,会产生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。 当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最大。注意这里说的是“力矩”最大,而不是“力”最大。诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。补充一句,力矩是力与力臂的乘积。其中一个为零,乘积就为零了。 当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,
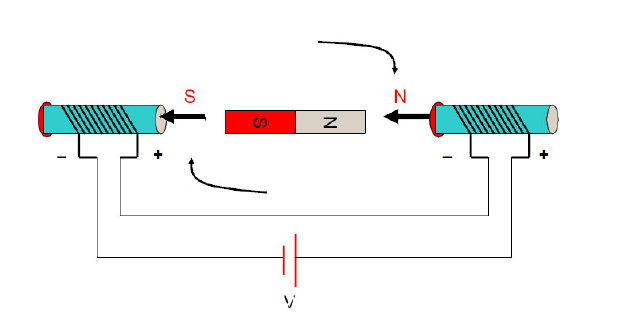
如此不断改变两头螺线管的电流方向,内转子就会不停转起来了。改变电流方向的这一动作,就叫做换相。补充一句:何时换相只与转子的位置有关,而与其他任何量无直接关系。
一般来说,定子的三相绕组有星形联结方式和三角联结方式,而“三相星形联结的二二导通方式”最为常用,这里就用该模型来做个简单分析。

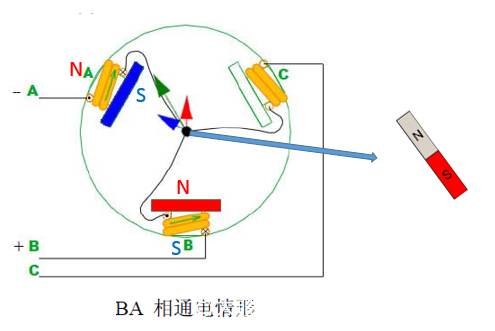
上图显示了定子绕组的联结方式(转子未画出假想是个二极磁铁),三个绕组通过中心的连接点以“Y”型的方式被联结在一起。整个电机就引出三根线A, B, C。当它们之间两两通电时,有6种情况,分别是AB,AC, BC, BA, CA, CB注意这是有顺序的。
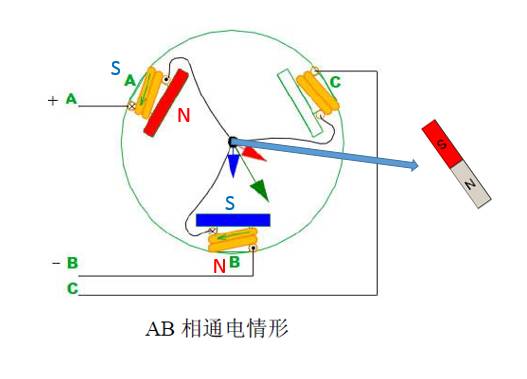
当AB相通电,则A极线圈产生的磁感线方向如红色箭头所示,B极产生的磁感线方向如图蓝色箭头所示,那么产生的合力方向即为绿色箭头所示,那么假设其中有一个二极磁铁,则根据“中间的转子会尽量使自己内部的磁感线方向与外磁感线方向保持一致”则N极方向会与绿色箭头所示方向重合。至于C,暂时没他什么事。 ▼第二阶段:AC相通电

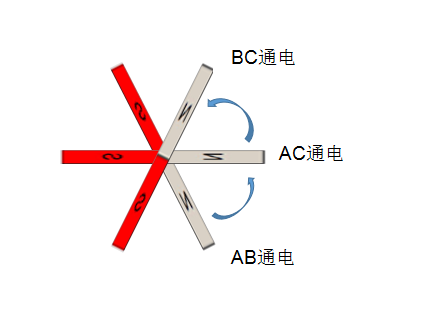
为了节省篇幅,我们就不一一描述CACB的模型,你们可以自己类推一下。以下为中间磁铁(转子)的状态图:

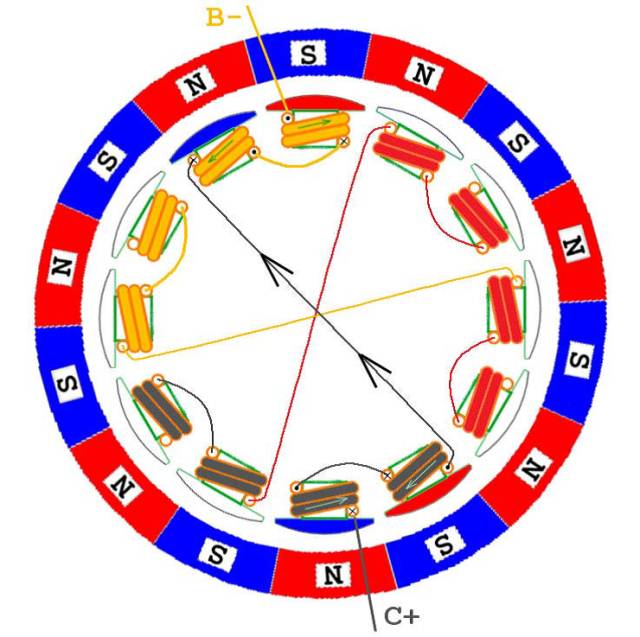
我们再来看一个复杂点的,图(a)是一个三相九绕组六极(三对极)内转子电机,它的绕组连线方式见图 (b)。从图(b)可见,其三相绕组也是在中间点连接在一起的,也属于星形联结方式。一般而言,电机的绕组数量都和永磁极的数量是不一致的(比如用9绕组6极,而不是6绕组6极),这样是为了防止定子的齿与转子的磁钢相吸对齐。
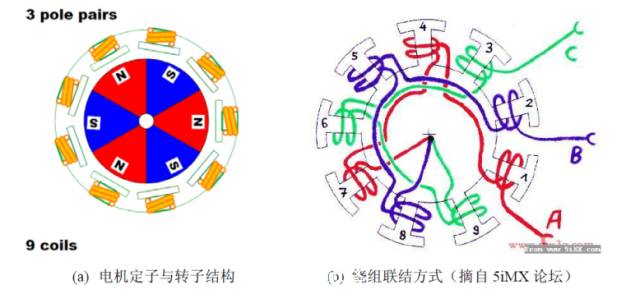
其运动的原则是:转子的N极与通电绕组的S极有对齐的运动趋势,而转子的S极与通电绕组的N极有对齐的运动趋势。 即为S与N相互吸引,注意跟之前的分析方法有一定的区别。 好吧,还是再帮大家分析一下吧,
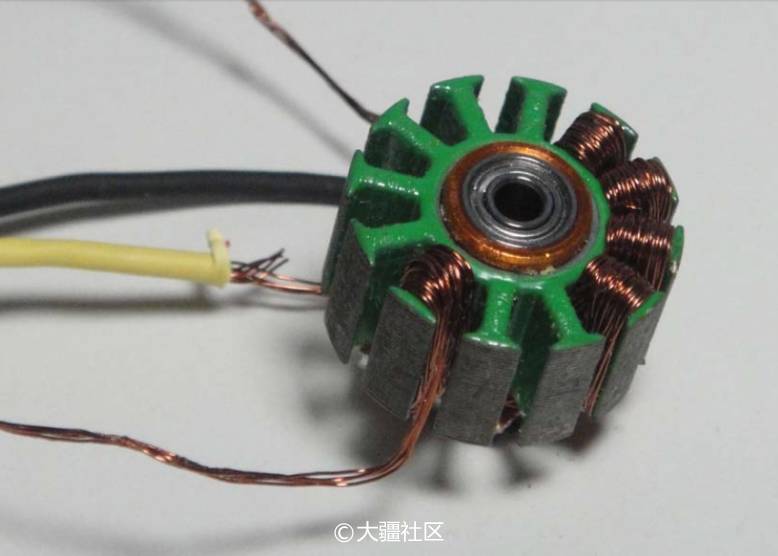
看完了内转子无刷直流电机的结构,我们来看外转子的。其区别就在于,外转子电机将原来处于中心位置的磁钢做成一片片,贴到了外壳上,电机运行时,是整个外壳在转,而中间的线圈定子不动。外转子无刷直流电机较内转子来说,转子的转动惯量要大很多(因为转子的主要质量都集中在外壳上),所以转速较内转子电机要慢,通常KV值在几百到几千之间。也是航模主要运用的无刷电机顺便啰嗦一下吧。无刷电机KV值定义为:转速/V,意思为输入电压每增加1伏特,无刷电机空转转速增加的转速值。比如说,标称值为1000KV的外转子无刷电机,在11伏的电压条件下,最大空载转速即为:11000rpm(rpm的含义是:转/分钟)。 同系列同外形尺寸的无刷电机,根据绕线匝数的多少,会表现出不同的KV特性。绕线匝数多的,KV值低,最高输出电流小,扭力大;绕线匝数少的,KV值高,最高输出电流大,扭力小。我先前测试过穿越机2204电机的极限电流,单电机能彪上25A,而2212系列电机15A都上不了。
分析方法也和内转子电机类似,大家能自己分析一下,根据右手螺旋定理判断线圈的N/S极,转子永磁体的N极与定子绕组的S极有对齐(吸引)的趋势,转子永磁体的S极与定子绕组的N极有对齐(吸引)的趋势,从而驱动电机转动。 经典无刷电机2212 1000kv电机结构分析。
其结构如下:定子绕组固定在底座上,转轴和外壳固定在一起形成转子,插入定子中间的轴承。
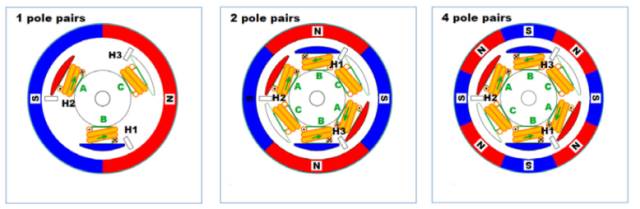
后面画出了6种两相通电的情形,能够准确的看出,尽管绕组和磁极的数量可以有许多种变化,但从电调控制的角度看,其通电次序其实是相同的,也就是说,不管外转子还是内转子电机,都遵循AB->
后面画出了6种两相通电的情形,能够准确的看出,尽管绕组和磁极的数量可以有许多种变化,但从电调控制的角度看,其通电次序其实是相同的,也就是说,不管外转子还是内转子电机,都遵循AB-CB的顺序进行通电换相。当然,如果你想让电机反转的话,电子方法是按倒过来的次序通电;物理方法直接对调任意两根线,假设A和B对调,那么顺序就是BA->
CB的顺序进行通电换相。当然,如果你想让电机反转的话,电子方法是按倒过来的次序通电;物理方法直接对调任意两根线,假设A和B对调,那么顺序就是BA-
▲CB相通电 要说明一下的是,由于每根引出线同时接入两个绕组,所以电流是分两路走的。这里为使问题尽量简单化,下面几个图中只画出了主要一路的电流方向,还有一路电流未画出,另一路电流的详细情况放在后面做多元化的分析,涉及到电路检测换相位置。
关键字:编辑:什么鱼 引用地址:无刷电机工作及控制原理图文解析上一篇:PLC的6种实用技巧
1. 引言 直流永磁无刷电动机由于其结构相对比较简单、可靠性高、低速大扭矩等特点而得到了愈来愈普遍的应用,尤其是近年来在电瓶车中得到了广泛应用。由于电瓶车是人们的日常代步工具,因此人们对整车的启动平稳性,噪音等指标提出了较高的要求。现有电动车电机大部分采用直流永磁无刷电机,电机的铁芯为直槽结构,绕组为三相星形连接,逆变器一般工作在两两导通状态。由于直槽电机在工作时扭矩波动较大,因此我们一定要优化电机的结构并配合经过优化设计的控制器才可以获得比较满意的效果。本文就如何设计直流永磁无刷电机超静音控制器作一些探讨。 2. 直流永磁无刷电动机的转矩脉动分析 永磁无刷电动机由于电磁因素、齿槽的影响、电流换向、电枢反应等
前 言 传统的直流电机以其优良的转矩特性和调速性能在运动系统中存在广泛的应用,但机械电刷却是它致命的弱点。电刷的存在带来了一系列的问题,如机械摩擦、噪声、电火花无线干扰,再加上寿命短、制造成本高及维修困难等缺点,从而大大限制了它的应用场景范围。直流无刷电动机是利用电子换向装置代替传统的机械换向(电刷和换向器)的一种电动机,既保持了有刷电机的优良特性,又避免了电刷和换向器带来的缺陷。本文以32位ARM Cortex-M3内核的高性能微处理器LPC1766为核心,设计了直流无刷电机控制管理系统。该系统电路简单,软硬件开发方便,具有较高的性价比。 1 LPC1766简介 微控制器采用LPC1700系列ARM芯片LPC1766
控制系统的设计 /
驱动系统与无刷电机的特性有着密切的关系,人们已经采用很多方法来改善电机的可控性和特性。在本文中,我们将解释两种典型的驱动系统:方波驱动和正弦波驱动。 电机驱动系统 3.1.1 方波驱动系统(120°导通方式) 无刷电机驱动系统有很多种,120°导通方式的方波驱动就是一个常见的例子。如图 3.1 所示,该方法涉及根据霍尔效应 IC 输出信号的组合来切换激励状态。虽然在低速运行期间会出现速度纹波,但能够最终靠简单的电路实现高输出功率。因此,它被大范围的使用在控制办公自动化设备和功率设备的无刷电机。 3.1.2 正弦波驱动系统 如图 3.2 所示,正弦波驱动系统是对施加电压进行精细控制,使电机电流呈正弦波的驱动系统。该驱动系统具有少量扭
驱动系统详解 /
在第 4 部分中,我们将解释无刷电机的主要组件:反馈、磁场和永磁体。 无刷电机的主要部件 2.3.1 磁极检测部件 霍尔元件 霍尔元件是利用霍尔效应检测转子磁铁的磁场并输出信号的磁性检测元件。 受北极磁场影响的霍尔元件状态如图 2.12 所示。 如果电流从元件的上部流向下部,并受到来自北极的磁场沿箭头所示方向的影响,则元件内部的电荷分布会因电磁力而变得不平衡。结果,产生了以直角穿过电流和磁场的电动势。 霍尔元件输出信号是数百毫伏的微弱模拟电压。如果像电机一样南北两极不断交替,那么如图2.14所示,在磁场稳定的区域输出恒定,在磁极切换的区域变化平缓. 由于信号较弱,在信号线较长的地方和电子噪声较多的环境中,很容易受到噪声的影
的主要部件 /
当磁铁(转子)磁场的相位比线圈(绕组)磁场的相位滞后90 度时,能够得到电机的最大转矩。由于相感应电压的相位相对于磁铁(转子)磁场超前90度,相电流与线圈磁场相位相同,因此在相感应电压与相电流的相位相同的条件下,能够得到最大转矩。 然而,如下图所示,当按照与相感应电压相同的相位施加电压(红色),以期相电流(黄色)与相感应电压(蓝色)的相位相同时,受绕组的电感分量影响,相电流(黄色)会产生相位滞后(红色箭头)。相转矩是相感应电压和相电流之积,但相乘后的值会有负值部分(下图左侧波形中灰色带所示期间),在这种负值期间会变为负转矩,效率会下降。 为了改善这类问题并提高效率,能采用一些校正方法,比如通过使相施加电压的相位超前来使相
中的超前角控制 /
有刷电机工作原理 有刷电机是大家最早接触的一类电机,中学时物理课堂上介绍电动机也是以它为模型来展示的。有刷电机的主要结构就是定子+转子+电刷,通过旋转磁场获得转动力矩,从而输出动能。电刷与换向器慢慢的接触摩擦,在转动中起到导电和换相作用。 有刷电机采用机械换向,磁极不动,线圈旋转。电机工作时,线圈和换向器旋转,磁钢和碳刷不转,线圈电流方向的交替变化是随电机转动的换相器和电刷来完成的。 在有刷电机中,这样的一个过程是将各组线圈的两个电源输入端,依次排成一个环,相互之间用绝缘材料分隔,组成一个象圆柱体的东西,与电机轴连成一体,电源通过两个碳元素做成的小柱子(碳刷),在弹簧压力的作用下,从两个特定的固定位置,压在上面线
的技术原理 /
电机驱动能效不论提高多少,都会节省大量的电能,这就是市场对先进的电机控制算法的兴趣日浓的部分原因。三相无刷电机主要指是交流感应异步电机和永磁同步电机。这些电机以能效高、可靠性高、维护成本低、产品成本低和静音工作而著称。感应电机已在水泵或风扇等工业应用中得到普遍应用,并正在与永磁同步电机一起充斥家电、空调、汽车或伺服驱动器等市场。推动三相无刷电机发展的根本原因有:电子元器件的价格降低,实现复杂的控制策略以克服本身较差的动态性能成为可能。 以异步电机为例。简单的设计需要给定子施加三个120°相移的正弦波电压,这些绕组的排列方式能够产生一种旋转磁通量。利用变压器效应,这个磁通量在转子笼内感应出一股电流,然后产生转子磁通量。就是这两种磁通
随着电力电子技术,新的永磁材料以及具有快速运算能力的 DSP (数字信号 处理器 )的发展,直流 无刷电机 应用日益普及。直流无刷电机具有和直流电机相似的优良调速性能,又克服了直流电机采用机械式换向装置所引起的换向火花、可靠性低等缺点,且具有体积小、重量轻、效率高、电机的形状和尺寸灵活等优点,因此大范围的应用在伺服系统、数字控制机床、电动车辆和家用电器各领域,成为现代伺服技术的主方向。 本文的主要内容是基于DSP芯片MC56F8323的直流无刷电机控制器的硬件设计。最重要的包含电流环、速度位置环和IPM(智能功率模块)驱动电路的硬件设计。 2 控制器系统设计 2.1 系统硬件框架设计 MC56F832
控制器的硬件设计 /
有奖直播报名|Keysight World Tech Day 2023分论坛——汽车无人驾驶与新能源
免费申请:价值799的国产高性能RISC-V Linux开发板LicheePi 4A
立即报名 STM32全国巡回研讨会即将开启!(走进11城,9/12-10/27)
乍一看,今天的汽车看起来跟几十年前的汽车没什么差别,但事实并非如此。车舱内、引擎盖下甚至轮胎内都隐藏这巨大的变化,可谓到处都有进步 ...
为工业以太网器件供电要解决工业以太网和工业应用的几个特定问题。标准以太网与工业以太网之间最大的不同之处在于拓扑结构,如图1所示。标准 ...
PLC最全编程算法PLC编程算法(1):PLC中无非就是三大量:开关量、模拟量、脉冲量。搞清楚三者之间的关系,你就能熟练的掌握PLC了。1、 开关 ...
启动应用程序配置程序使用应用程序配置程序,您能确定使用MOVIPRO执行哪些应用程序。能够直接进行不同的配置,从简单的速度设置点到总线定位 ...
伺服控制管理系统广泛的应用在工业机器人、数字控制机床、电子制造、印刷机械、纺织机械等领域,在工业生产里发挥重要的作用。在工业机器人和数控机 ...

嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科词云:
下一篇:轿车发动机解析图高清